
Unlike sports or board games, the great thing about video games is that you can play it alone thanks to the AI; the Artificial Intelligence, presenting you with a challenge by means of opposing enemies. AI is in nearly every game, and as a result with our ever ascending technological breakthroughs, developers are blessed with the opportunity to further improve the AI, making them smarter and more capable, one day they will be smart enough overthrow us and enslave us, nothing to worry about, a kid born out of a confusing time paradox and a robot with a funny accent will save us all. Coincidentally related to the previous sentence, one of the many ways to implement AI is with the A* algorithm.

The A* is an algorithm is a pathfinding and graph traversal that allows an object to follow something. This is done by planning out a traversable path between nodes. It uses a best-first search and finds the shortest (rather least costly path if you think in terms of Big (O)) from an initial node to one goal node. It follows the path of the lowest expected total distance basically whilst keeping a sorted priority queue of alternate paths.It identifies all possible routes that lead to the goal.
A* takes into account distances it already travelled; the g(x) part of the heauristic is the cost from the starting point. The formula for A* is f(n) = g(n) + h(n), g(n) is the cost of the starting node to reach n, and h(n) is the estimate of the cost of the cheapest path from n to the goal node.
Take this unweighted graph for instance:
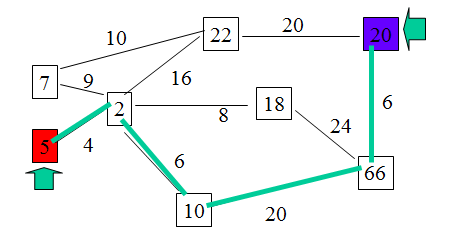
We want A path 5 –> v1 –> v2 –> … –> 20
As such g(20) = cost(5àv1) + cost(v1àv2)+…..+ cost(à20)
A* generates an optimal solution if h(n) is an admissible heuristic and the search space is a tree, see h(n) is admissible if it never overestimates the cost to reach the destination node. It also generates an optimal solution if h(n) is a consistent heuristic and the search space is a graph as h(n) this time is consistent if for every node ‘n’ and for every successor node n’ of n, as such: h(n) <= c(n,n’) + h(n’)
Have you ever played a PC game where the computer always knows exactly what path to take, even though the map hasn’t actually been explored yet? Depending upon the game, pathfinding that is too good can be unrealistic. Fortunately though, this is a problem that is can be handled fairly easily.
The answer is to create a separate knownWalkability array for each of the players and computer opponents. Each array would contain information about the areas that the player has explored, with the rest of the map assumed to be walkable until proven otherwise. Using this approach, units will wander down dead ends and make similar wrong choices until they have learned their way around. Once the map is explored, however, pathfinding would work normally. F.E.A.R is an example of a game that uses A* to plan its search.

I’ve programmed an A* algorithm before, it’s a basic but tremendously useful search algorithm that can be used from simple flash games to AAA titles, it’s like the Liam Neeson of algorithms. For the first time in your life you could get people to willingly come after you, well your game object at least. A programmer can dream can’t he?
P.S. you can thank Brett Gilespe for the joke in the title of this blog, that was a good one.
